探讨桅杆起落同步
来源:原创 作者:sng 发布时间:2010-03-15 17:42
|
正常情况下,我们操作桅杆手柄时,Y轴会控制2桅杆的起或者落。
首先桅杆的起和落以及调平动作都是由左右2个桅杆油缸的动作来实现的。起桅和落桅过程中,桅杆的同步对于安全性和操作性显得格外重要。
正起落桅的宇通旋挖钻机
简单来说,控制原理是电控液,调平手柄分别XY轴向的2个滑动电阻,当向某方向扳动,滑动电阻根据滑动位置不同输出不同大小电流到控制器,再由控制器输出乘以一定比例的(相信你看出来了,这个比例是可调的,后面会说到)电流到辅助控制阀的桅杆控制阀片的电磁比例阀。顾名思义,电磁比例阀就是会根据电流大小比例的调整阀心开启大小(严格来说是调整压力大小),从而控制桅杆速度的快慢。
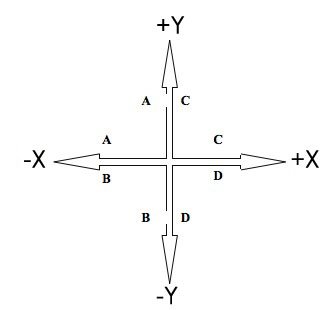
到此我们还没有说到同步的问题,好了,下面开始。 所说的同步也即手柄只Y向操作时,因为手柄的如下图所示,标注的方向(前、后、左、右)以驾驶室为标准。A、B、C、D表示调平手柄和控制器控制的四个比例电磁阀,每个方向由两个电磁阀来驱动。桅杆的起立和收降的同步,就是通过改变A、B、C、D的驱动电流以实现左右两个油缸的同步动作。
现调平控制器中有以下参数:
A向X轴最小管路电流 我们暂称为Axmin
A向X轴最大管路电流 同样 Axmax
B向X轴最小管路电流 Bxmin
B向X轴最大管路电流 Bxmax
C向Y轴最小管路电流 Cymin
C向Y轴最大管路电流 Cymax
D向Y轴最小管路电流 Dymin
D向Y轴最大管路电流 Dymax
我们假设起桅时左右两个油缸伸出的速度存快慢。调整参数的方法如下:
起立桅杆是由A,C两个电磁阀驱动的(收降桅杆是由B,D两个电磁阀驱动),A控制左油缸的向上运动,C控制右油缸的向上运动(B控制左油缸的向下运动,D控制右油缸的向下运动)。
如果起立杆时出现桅杆左偏,说明左油缸速度慢。调大控制器参数Axmin和Axmax(这是一个范围,而且min和max必须同步调整。而min和max间范围的大、小可决定油缸动作的快与慢即刚才所说控制器输出电流系数)。
同样如果起桅时出现桅杆右偏 ?或者落桅时出现左偏,右偏呢? 热心好学并且聪明的你一定能给出答案 !! 期待你的评论 嘿嘿
说明: 本文旨讨论原理,请勿旋挖钻机上实践!
关于桅杆抖动的文章 请参考海哥大作 浅谈桅杆抖动
|
本篇编辑:王海